80\20 T-slotted aluminum hardware rules, but it’s kind of expensive and even the 20-series is just a little too big to make sense for a lot of electronics DIY stuff.
Makerbeam is a 1cm profile series that should be the perfect compliment to 80\20, and at first glance it’s great and seems semi-affordable even for small amounts, but that’s just looking at the extrusions.
I got 4 sticks of 300mm MakerBeam for $18 to try out and thought- hey, this isn’t too bad. Way more than wood but this is reusable foreverish. But I mistakenly thought that a standard M2 nut could work in the slot. I was wrong. Pan head M3 bolt wont fit either, you need a square head bolt or a flat nut… no big deal, right? The M3-5 hammer nuts for 80\20 are like $10 for 50 so I can deal with that.
Nope- the makerbeam M3 flat nuts are freaking outrageous- like a buck each for about .01 cents worth of stamped metal with an M3 hole… freaking infuriating.
The whole point of getting this stuff is that I’m not a machinist, so if I have to start making my own fasteners this goes sideways fast. But… I figured out you don’t have to be a machinist to make something workable.
Just needed snips, drill, screwdriver, and a little file helped. A sane person that owned a functioning drill press would do even better.
Started with scrap copper sheet I’d pulled out of a laptop heatsink years ago (Hoarding heatsink materials pays off very occasionally). Cut off a strip thin enough to slide in the MakerBeam slot and drilled some M3ish sized holes. I don’t have an M3 tap so I just filed out a little and turned an M3 through it.
The surprisingly cool part is that even if the hole is off- when you put it in the slot and screw it down it does sort of a brake press action on the nut and it trues up in the slot. They’re not as strong obviously but if you’ve got loads that can tear copper I guess just pay the buck. I figure this could also be a decent alternative the brackets which are also outrageously priced, but actually I’ll probably just use 80\20 for most stuff because this isn’t trivial enough to make dozens of nuts whenever I need them so it’s actually not all that workable, just more so than paying $1 per nut.
I’m having a lot of fun with my new watermeal obsession and I’m going to use it as an excuse to pontificate on all kinds of topics that are only vaguely related to trying to grow watermeal. So here’s some of that.
I’m not really a plant person. I used to say I had a ‘black thumb’ because things I grow tend to die. But I don’t really have a large enough dataset to say even that. I grew corn and tomatoes once. I’ve thought about growing algae for a long time. And I couldn’t keep a peace lily that my grandmother gave me alive even though I really tried. Those three sentences are pretty much my entire horticultural resume. So it should probably be odd that I’ve decided that it’s my duty and pleasure to unravel the mystery of ‘least duckweed’, but it makes sense if you’re me.
I’m a life-long technology geek. Anything from a steam-engine to a space-ship is worth knowing about. Not that I ever thought that plants were outside the realm of technology- agriculture was humanity’s earliest and most important technological masteries . But me and plants never really made friends. I get them from a molecular-engine kind of perspective, but they have a shit-load of inputs and variables I have no man-made analogy to help me understand. They’re kind of black-box, proprietary hardware and software with no documentation. All you can do is try different inputs and log the output. Also they’re just kind of slow.
But I want to know about duckweed, and it seems like more people want to kill it than grow it, so I’m running into a newish situation where I want understand something that there’s not much information on, but it’s way outside my experience of how you go about understanding a new thing. I’m used to the limited information part- but only in areas where I have extensive context to figure out the information I need.
I can’t take watermeal apart or examine its source or logs. I can’t compare its function to something I already understand, there are no schematics or pinouts, and I can’t take a snapshot before I try something crazy and then rollback when everything blows up. It’s like someone handed me a completely alien technology that creates food from nothing and I’m not even sure which side is the front.
Of course I’m exaggerating, I know some basic biology and I read so it’s an ‘alien technology’ that humans have been studying for thousands of years, but I’m not those humans right now so it’s still kind of new to me.
I thought I had a pretty good understanding of scientific methodology and sort of practiced it in problem solving for work and DIY projects and whatnot. But messing with alien plant technology has forced me to face the fact that I’ve never actually employed the scientific method on nature, only on human devices. What that means is I’ve never really employed the scientific method at all. I’ve employed intuition and deduction in a context where I had sufficient knowledge that I didn’t really need to be all that scientific to find the solutions I needed. I can’t rely on any of that to figure out how a plant works.
So what do I do to prepare for this new challenge? Do I try to become the rigorously methodical scientist that I like to imagine I could have been if I wasn’t a lunatic? Sure… maybe while I’m at it I’ll become an unflappable, cool-headed operator who can pilot a lawnmower through a hurricane. I’ll get right on that. No- I think I have to do this the way I do everything that I’m not paid to do- with no regard for anything except whatever I feel like doing. It’s a sort of casually-aggressive dilettante-ology style of learning. It may or may not accomplish anything useful, but it keeps me entertained.
It is kind of fun to keep looking at this as a technology problem- the alien black box thing. So I have this device, but I don’t know anything about the designer’s intent or record… or do I? Actually- in a lot of ways evolution is a far more consistent and reliable designer to make assumptions about. I know evolution only cares about what works- literally nothing else matters. Path dependency adds a potential weirdness factor, but other than that I can safely assume if something works a certain way, it’s because it worked that way when it really, really had to for a bunch of millions of years. That’s actually pretty liberating from a technology analysis standpoint. I don’t have to consider any human stupidity, arrogance, or greed at all, none of that even existed when these devices were designed.
I find myself asking questions like “was watermeal designed to adjust its reproductive activity in response to evaporation?”. And of course nature’s response is “wtf does evaporation mean?” So I have to consider what inputs watermeal would have available to ‘know’ that evaporation was happening or what to do about it. I figure it might ‘sense’ that slowly increasing concentrations of nutrients might indicate evaporation. And maybe that causes it to adjust its reproduction energy. But the ‘meaning’ of those changes in concentration would depend on the volume of water, so maybe it derives even more complex situational awareness with a ‘memory’ of the state and rate of change of nutrients. And now I get to figure out how to design an experiment to test that. This is fun.
I’m personifying watermeal and implying it has ‘intent’ out of literary habit, I should probably stop that- but I wont. But I like that this is still just inputs and outputs, just like technology should be.
But with technology the default state is non-functionality. If a technology works it’s because somebody made it work. If it breaks- well, that just happens eventually unless you keep preventing it. Plants are kind of the opposite. Their default state is functionality- otherwise they wouldn’t exist. So if a plant breaks- it means I broke it, but if it grows, all I did was not screw something up.
With technology that sort of justifies perpetually checking and poking at things a little bit. If it ain’t broke- don’t fix it, but you can still poke at it a little to understand it better for when have to fix it eventually.
With plants I’m pretty sure the poking really, really doesn’t help and that’s a tough adjustment for me. The idea that these fascinating little machines are furiously replicating themselves and I’m just supposed to pop some lights and sensors on and walk away for days at a time is just bananas to me. But I think that’s how this works.
You’d think with all this pontificating I would have something tangible to share that I’ve learned about watermeal, but I don’t think I do, but since I have been messing around with it for a couple of weeks I’ll try to write down a few things about the actual plant instead of making it all about me and what I think about stuff, but that’ll probably creep in anyway.
~Apparently they are pretty hard to kill from neglect, which is great. I put some in clear water with no nutrients and left it in a corner with barely any light and they’re still about half green after 3 weeks. The rest have turned white and sunk to the bottom, which I’m assuming is death- but actually it may not be because apparently they can overwinter as a ‘turion’ thing so maybe they’re doing that but they look kind of dead to me.
~I don’t think they like light 24/7. I’ve only just started to learn about horticultural lighting and spectrums plants care about, but I’ve got a full-spectrum LED that at 6″ gives me the same lux reading as sunlight on a clear day. I’m just using a TSL2561 lux sensor but I figure it’s close enough for now. But at first I was leaving it on 24/7 and quite a few started to turn white and sink. I started turning the light off at night and they seem to be doing better, but all this is anecdotal. I haven’t quite figured out how I’m going to quantify their growth yet but I’m thinking it’ll probably involve learning some more computer vision stuff.
~I still don’t know what nutrients to use, but I’m trying a few things I’ve found online for DIY miracle grow types of cocktails. White vinegar, ammonia, baking soda, epsom salt, coffee grounds, and green tea are what I’ve tried so far. Ultimately I’d want to know how to integrate watermeal into a more complex life-support chemical-cylce but that’s way, way off so I’m just looking for whatever works and is easy.
~Evaporation control is going to be an issue. I’m using fairly small containers and I’m concerned evaporation will make the nutrient levels fluxuate way more than they would in nature and that might not be good for the watermeal and will be very bad for getting consistent data. Fortunately peristaltic pumps are pretty cheap and I can rig up some pi\arduino controls. Also I like that the peristaltic pumps won’t disturb the water that much- at the moment adding water stirs up the surface a bit and makes the timelapses kind of useless for seeing if it’s actually growing. Might be another computer vision opportunity to detect water levels too. Seems cleaner than a bunch of level sensors.
So I’m still waiting on some 80\20 parts for the next testing rig but I soldered up a little raspberry pi ‘hat’ for the temperature sensors, a luminance sensor, and a relay to control the LED, it’ll also have a USB webcam. The plan is to just crontab everything- schedule the light timing, and take sensor readings and photos. I can’t just close it up and leave it for too long because of the evaporation issue, but for now I have a decent workaround for adding water without disturbing the surface much.
No pictures or videos with this post, just a bunch of words. I do have a few weeks of various time-lapses but I’ve been using an ESP32CAM and it’s not great for close up imaging like this so they’re pretty useless. I was surprised I had to use an ND filter in the light box, but fortunately I have an old lighting gel sample pack- it took 6 stops worth, that 50W LED really belts light.
This is another one of those posts that I have to make so I can be ‘done’ with some ridiculous thing that I know I’ll never put enough effort into actually being done with.
At some point I thought it would be interesting to have a flat device that extended to a surprising vertical height using a flat coil like a tape measure. A little curl gives flat tape a little rigidity against pressure on the convex side. Thought maybe using two facing each other could give you enough strength to raise up a strip of LEDs. Figured that would be a cool effect right there- little lights that smoothly lift up out of the ground.
It’s kind of a dopey cousin of the ‘Kataka Actuator’. I promise I thought of this before I knew about the Kataka, but it doesn’t matter because they work completely differently. Also the Kataka has a lot more potential utility because it’s fairly strong and can lift useful loads whereas this is just for display type applications. Unfortunately the Kataka apparently suffers from intellectual property crapola that make it too expensive to be useful to anyone like me.
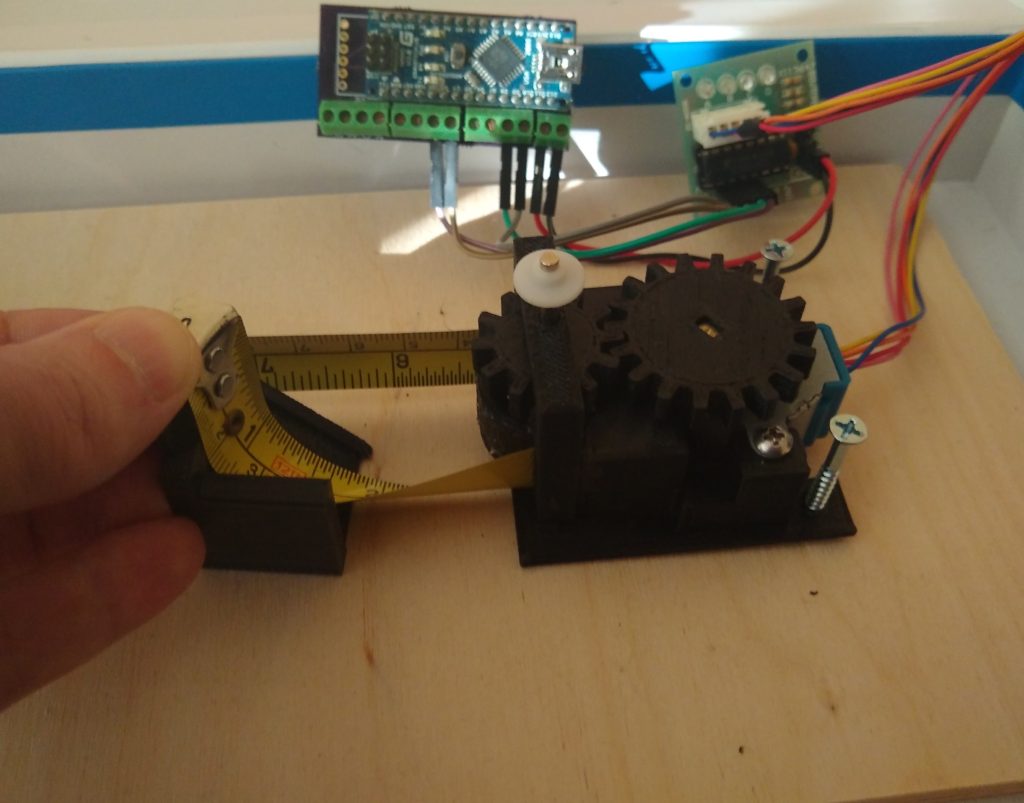
I finally put about a half-day into a crappy proof-of-concept and basically proved to myself that the tape-measure idea probably could work but I didn’t feel like working out all the mechanical kinks to make it actually work.
So here it is. The tape-pulling mechanism kind of worked. I had to coat the ‘drum’ with silicone caulk to make it more grabby. A tractor feed system with punched holes in the tape would be more ideal. The ‘turn block’ was trickier than I realized. I’d need to design a better contained but gentler pathway to get it to turn the 90 degrees upwards without binding up the whole feed.
And I put a little thought, but no design, into figuring out how to combine two tape-feeds into one ‘pole’. Figure the easiest thing is just mirror the whole assembly on the other side that meet in the middle to turn upwards, though driving that from a single motor gets more complicated.
Pretty sure I’m never going to get back around to this idea. Seems like someone with a fresher interest in stage lighting could make this a cool project, but I’ve got other obsessions brewing and I just wanted to post this so I can repurpose the arduino and motor, and also the box it’s been sitting in for 6 months because it’s a really nice box- not the blue one, but still nice. I didn’t post the 3d files because there’s why bother.
So my new thing is Wolffia Arrhiza. It’s what most people- including me up until a few weeks ago, would probably call pond scum. But seems like it might be awesome.
It is the smallest known flowering plant, hardy as hell, one of the fastest growing anything, and it’s got some pretty impressive nutritional content. It’s almost what soylent green was supposed to be until it turned out to be people. I just found out about it, which I find unacceptable. I’m going on the assumption that knowledge of this plant has been actively denied to me my entire life. Fortunately whatever overmind is trying to keep me ignorant took a nap and I found out. So- up yours, sleepy overmind.
I guess the required backstory on why I care enough to blame my ignorance of some random plant on an overmind is that I’ve been thinking about planning to maybe grow algae for a long time. Algae because it’s got a lot of potential to be space food. I figure growing stuff that future space people might eat is as close as I can come to contributing to humanity’s future in space, and at worst it’s food for humans, so why not?
Algae always just seemed the obvious answer. There are species of algae that provide all the amino stuff humans need, they can grow stupid fast, and being a goo seems like a minor benefit for space stuff in general. And it seems like NASA and\or sci-fi culture already decided algae is going to be on the menu at some point. It all seemed like a good idea on paper.
The problem with algae as a future space food is that I don’t understand algae and I’m too lazy to try. There are about a billion species, they’re kind of like plants, but also not. They’re kind of edible, but growing them wrong can poison you. Hard to tell the difference between good goo and bad goo without a microscope and chemistry set. Seems like growing space food should be harder to screw up that bad. Astrofarmers won’t all be hardcore biologists so seems like we need something like to a space radish, something you can grow and eat almost on accident.
I forgot where I stumbled on the word ‘watermeal’ but it jumped out at me and I got to looking. Found out it’s part of the ‘duckweed’ family that I’d maybe heard of and probably swum in, but there are several species. The ‘watermeal’ that interests me most is Wolffia Arrhiza aka least duckweed or spotless watermeal. It is used in some limited waste treatment capacities and a cheap food in some regions and has recognized but very untapped potential. Found a few articles sort of lamenting the fact that it isn’t more widely utilized as a food source and explaining how it could be introduced as one. Like this one from 1971 – https://www.nature.com/articles/232495a0. So apparently this isn’t news, it’s just another one of the many, incredibly valuable resources and discoveries that human civilization ignores in favor of more lucrative and unsustainable means. Greed and path dependency make the world what it is…
Anyway- most of the information I can find by googling was on eradicating it. It grows everywhere it can, and really fast, which can be understandably annoying unless you want a thin green mat covering your water, which most people don’t. But if you’re just looking for a highly efficient and robust biological mechanism to create the fuel necessary to sustain other biological mechanisms- well, you’ve found people-free soylent green. Also I read somewhere it can absorb CO2 from the air or dissolved in water, which seems like it could be a beneficial characteristic for use in a life-support system. But I’ll have to read more on how the dissolved CO2 thing works.
Also- most importantly for my petty human culinary sensibilities- it’s a grainy thing. About the size of a grit, so I might actually feel some satisfaction in chewing a spoonful once or twice. Though I haven’t actually eaten any yet, they’re actually much smaller than a grit when dry, so we’ll see how much texture they have. It’ll probably be a long while before I work up to a mouthful of the stuff though.
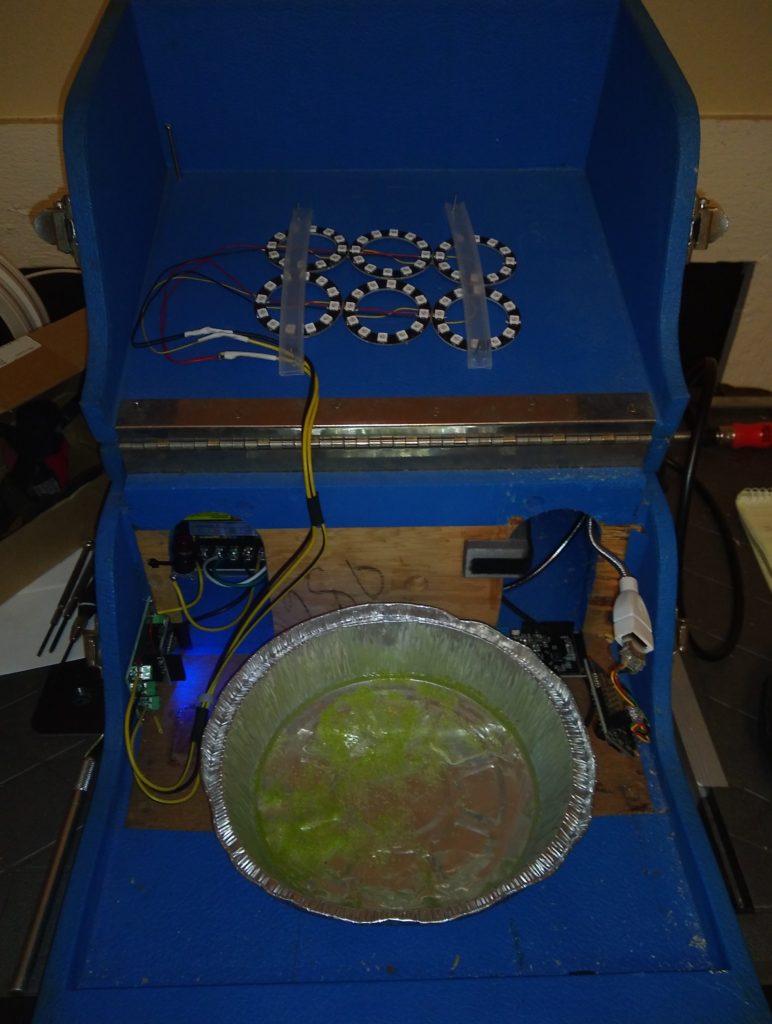
I ordered a bit off eBay from an aquarium vendor type person and repurposed that BlueBox as a little ‘grow box’- though that’s generous. It’s just a bunch of RGB LED rings blasting red\blue, which I know is not an actual grow light, but I have tons of RGB LEDs so figured why not. I also cobbled together an eyesore of a grow box with a 50W full-spectrum LED strapped to an old CPU heat sink.
A TSL2561 sensor reads about 2000lx under the LED rings and about 11000 under the 50W LEDs, but that’s at about 6-10″. That’s probably not enough light, but one of the things I like about this plant it grows perfectly flat so optimizing light coverage over an area should be pretty straightforward. I’m hoping I can figure out how to use arrays of smaller LEDs very close to the surface. Also curious if they can use light coming from both top and bottom.
I’m working on a more substantial testing rig. I’ve finally found the excuse I need to build something with 80\20 parts so if nothing else it’ll probably look cool. The short term goal is just to consistently grow the stuff. I’m not planning rigorous science or anything, but I’d like to play with a few variables and just see what I can do with pond scum.
So far my observations are pretty limited. It’s green, grainy, and seems to be alive, but I can’t even say for sure if it’s growing or dying yet. I have time-lapses running but they’re not really worth posting. I thought I noticed some interesting collective movement of the grains at first. The box is closed up so shouldn’t be much air moving around in there. I liked the idea that it was doing a semi-colonial slimemold routine and exploring its new environment looking for nutrients using simple interactions like a living cellular automata. But pretty sure that’s not what’s happening. More likely it was just evaporation and thermal stuff moving the water and warping the pan as a bunch of tiny plants slowly die because they don’t have enough light or nutrients because I don’t know what I’m doing.
So we’ll see how this goes. Might be my new thing, or I might get bored or distracted and do something else. Mostly just felt like writing about a cool new thing so this post happened.
As if I hadn’t taken this silicone LED thing to absurd enough extents… here’s more.
I came across a product called ‘Encapso K’ that I thought might be fun to test as an alternative to the acetoxy silicone I’d been using. I’ve found the super thick balsa ones never stop curing so they get bubbly and weird after six months or so. Plus I was just getting tired of the extreme goopiness of the caulking process. So I ordered a little kit of this new stuff. It’s two-part platinum cure that solidifies water-clear but is extremely brittle so it’s billed as ‘rubber-glass’ for glass and ice sfx uses. It lives up to the name too. It is clear as glass but cracks and crumbles kind of like a rubery stone. Crazy stuff.
Unfortunately I learned it will not cure inside of the vinyl tubes I use for the tube lights. I’m guessing it’s something about the chlorine in PVC being an asshole but I’m not a chemist. I could try acrylic tubes, but meh. And the liquid is too thin to make the balsa dioramas without precuring some little pieces to hold the planes in place like they use in resin casting and then it’s just resin casting with really brittle, rubbery resin. So I wasn’t quite sure what to do with the stuff for a while. The fact that it wouldn’t cure in the vinyl tubes was kind of a deal breaker for most ideas. And the brittleness wasn’t helpful.
Recently I thought it might be cool to encase the new brittle silicone in the old flexible silicone and then smash it and see what happened. And I did that. And this is what happened.
Pretty predictaby- it looks like fractured brittle silicone encased in a more flexible silicone, kind of like an ice cube.
So yay- I made a kind of an ice cube looking thing out of a couple of different mixtures of silicone. It looks really cool with an LED behind it I think. Maybe I’ll make a light out of it.
I did make a light with the same general idea using crushed glass in an upside down glass a while back. But I wasn’t a big fan of working with crushed glass. I used safety glass so it was little cubey grains but it still wasn’t great. And this way it looks like big chunks of broken glass but without dealing with big chunks of broken glass. So I ended up really thinking outside the box here by using this new silicone stuff to do exactly what it’s sold to do.
But the really surprising part of all this was finding out how fun it is to crack the interior silicone once it’s all cured up. Kind of hard to get the first crack in but once you do it feels like popping creme brulee bubble-wrap. Seriously- if you’re a compulsive folder or squisher or roller of whatever materials are around you- this is cosmic apotheosis. It’s kind of a one-time stress-ball, but it’s one hell of a time. The hardest part is stopping so you end up with a cool looking ice brick thing instead of a glazed snowball. I think I made the video mainly to show the cracking part. I always dig the LED stuff but wow- crushing up these weirdly squishy but crackly silicone bricks… glad I didn’t learn about this in my teens or I’d never have left the house.
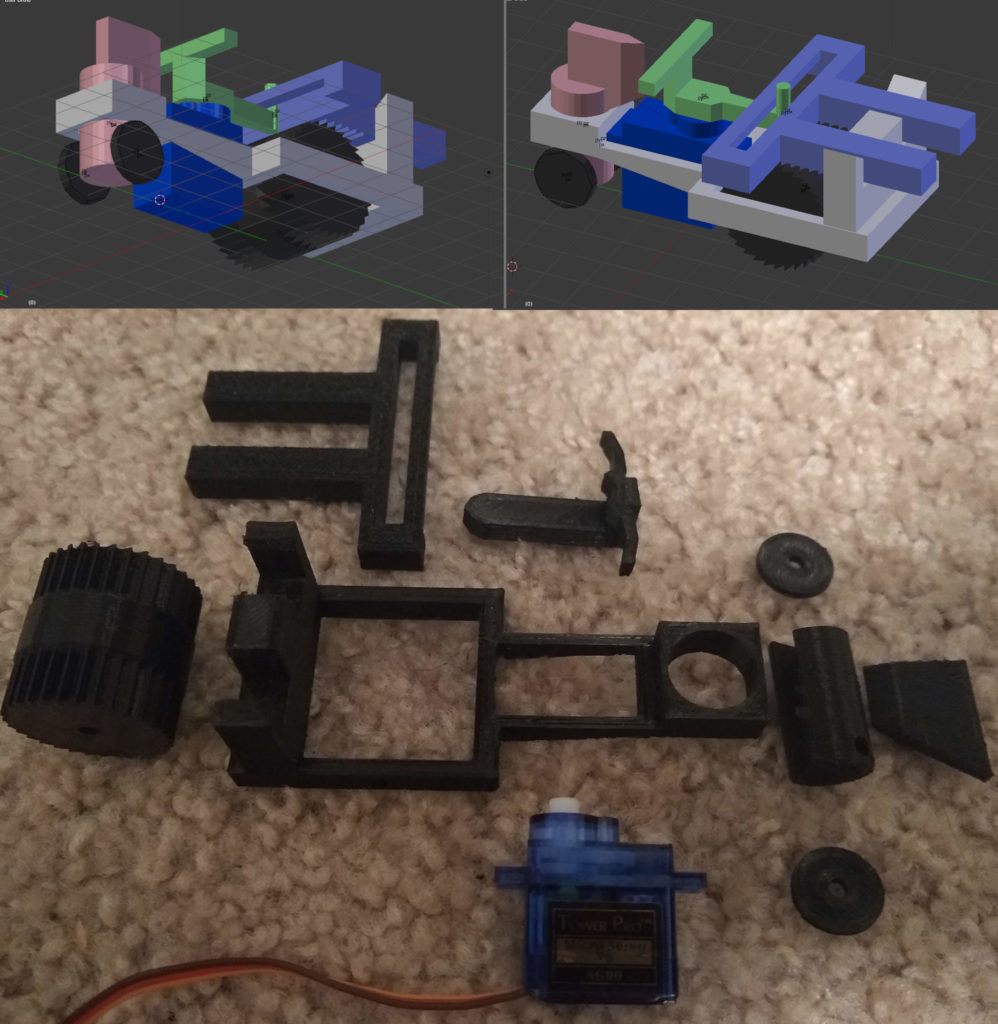
This is an attempt at a bot design that’s driven and steered by only one servo. I have no justification for this other than it seemed like it had to be doable.
I’m absolutely sure a single servo actuated steering\drive mechanism exists somewhere, but I couldn’t find any. I’m guessing the designs that do exist are for very specialized applications where some factor makes using only one servo desirable. Using two 9g hobby servos for any reasonable DIY application is pretty much as easy as using one, so there’s really no advantage in the added complexity of the linkages at all.
But despite it being a fundamentally pointless idea, I couldn’t get rid of it. A servo set up as a rear paddle of a canoe could control direction and momentum so why not a wheel? I thought about doing something like a ‘wheel paddle’ that would work a bit like a skate, pushing laterally to roll forward and varying the angle to each side to control direction, but that seemed like a copout somehow so I thought about more classic wheel\axle setups. This design is optimized for simplicity- lol… what that means is this is the minimum effort required to satisfy my weird compulsion to demonstrate this is possible, knowing I have no intention of taking it any further than that.
So the drive is a kind of rack and pinion thing with the teeth angled to turn the wheel on only one stroke direction. I should have used a little ratchet catch but didn’t. I’d seen more complex ‘mechanical rectifier’ setups that could drive on both strokes, but meh. I went with the T bar steering setup so you could kind of ‘set’ the direction and just work the servo around it so you can go straight and make smooth turns. Other options were to keep the steering connected to the servo but that would force it to always move in a serpentine pattern.
The video is a bit of a disaster. I tried to create the mechanism in the blender game engine using rigid body dynamics but I’m about 5 years out of practice with that program and forgot a lot so I just kind of winged it. The simulation is clearly jacked. The gear wheel doesn’t work right because I couldn’t figure out a directional rotation constraint and friction is wonky in the bge. Everything kind of floats, it’s awful, but I think it shows the functionality I wanted it to show and that’s the whole point of this pointless thing. I also tried to 3d print it, but… yeah- lot of quick-n-dirty solutions in the game engine version didn’t translate to matter so it didn’t really come together. But since I spent the time and the PLA I put it in the video too.
This obviously wasn’t a success, but I don’t think I can call it a failure either. Like a lot of my projects it kind of works in a way and if someone with more skill and determination took a stab it could probably be cool little demo thing. Anyway- it’s something I did so I could stop thinking about doing it so now I guess I’m done and I can do another thing.
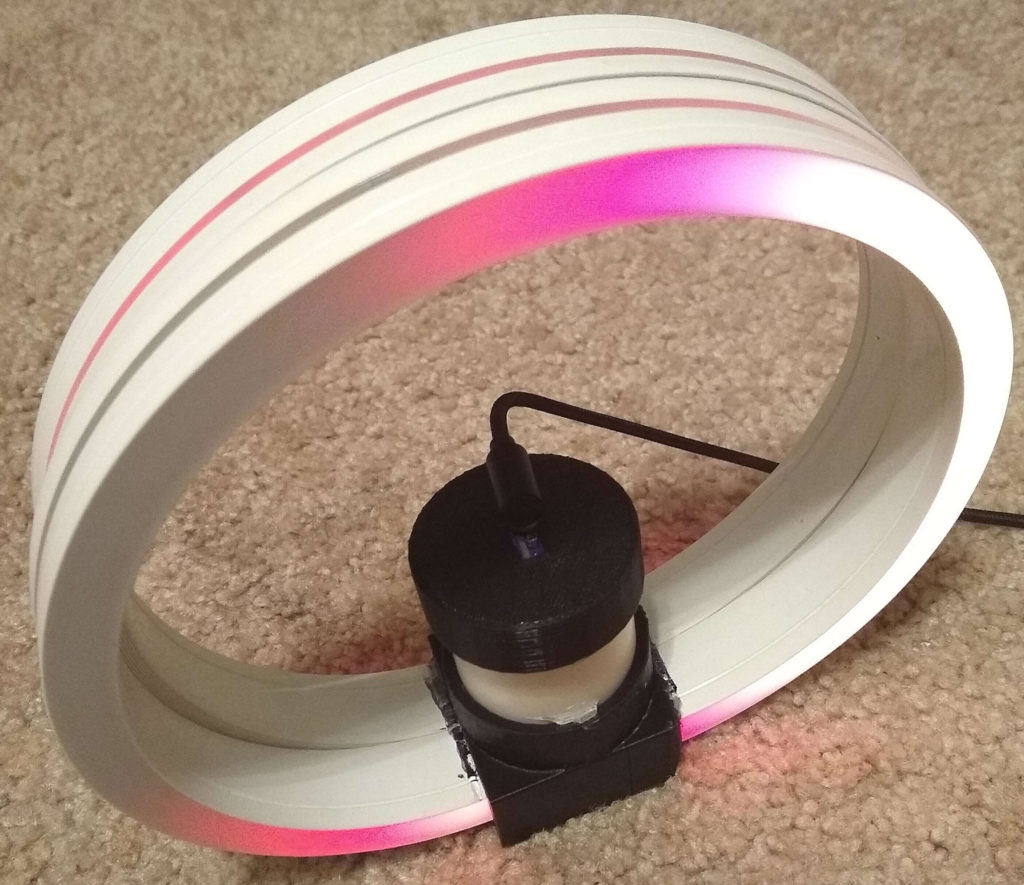
This light exists because a while back I bought some of that silicone-neon style strip diffusion and had to figure out something to do with it. Would have been cool to install the strip above a door or a footlight or something, but I rent so I don’t really do stuff like that.
So this is a pretty simple rig with (65) WS2812 LEDs on a D1 Mini running WLED. The structure is just a PLA printed holder that secures the strips and a small section of PVC housing the electronics. Originally there was a longer section of PVC and an 18650 battery module inside, but I wasn’t satisfied with the runtime with (65) LEDs so I just chopped it and went back to USB power. I popped in a mag-safe knock-off for the power supply. Those are really great.
I really like the diffusion these provide with 60/m LED strips. It’s not as great with 30/m and 144/m is very cool but probably overkill. They make several different profiles and focal patterns, I got this one by accident or mistake. I thought I ordered the circular neon style but this flat square style came so whatever. I’d love to make a larger installation of these on a staircase or something, but unless\until I own something worth a permanent setup I probably won’t be using this stuff very much. But now I have this little display piece to remind me how cool it would be if I ever did.
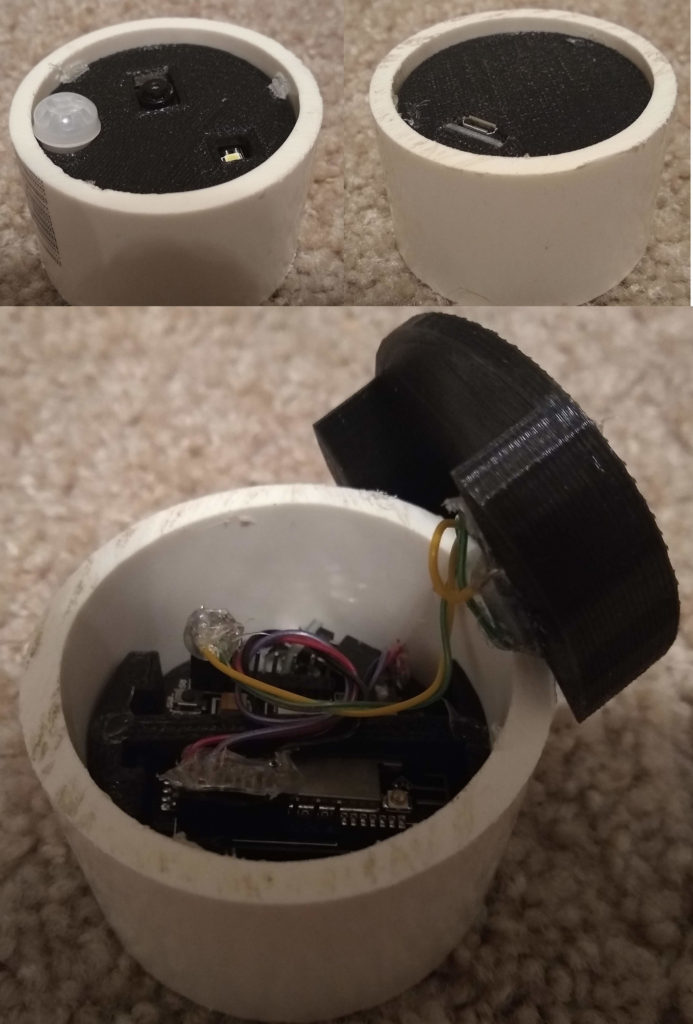
This is just a little housing idea for an ESP32CAM and AM312 PIR sensor A small section of 2″ PVC and PLA printed holder. Pretty simple and sturdy. I’m using this indoors with hass.io, but the PVC housing might be a good basis for exterior cameras too. I’m working on adding a battery module and using deep-sleep modes to make long-term time-lapses but this worked out pretty well so I figured I’d post it.
QQ108 Whale-Squid Evictor – A deceptively dangerous and capable military vehicle based on the submarine of the same name designed by the Whale-Squid tribe during the first Whale-Squid Squid Whale wars. Capable of operating in a range of atmospheric and marine conditions from deep ocean to near-space, the Evictor carries a range armaments and is both nimble and durable. Though the original submarine Evictor had a distinguished military service record, the new design has yet to see combat, because after other species saw what the Whale-Squid tribe did to the Whales and Squids, nobody really wants to fight them.
A long, long time ago in a timeline far, far, away, but still sort of here. Or maybe a long, long time from now, or maybe right now, however you correlate dates in alternate timeline stuff.
Anyways, whenever and wherever, on what we’d call Earth if we saw it, there were two really, really smart creatures that just kept getting smarter. If we saw them we’d call them whales and squid, and that wouldn’t be inaccurate, but those words don’t mean anything in this timeline, nor do any human words. But because this description of a timeline that humans never existed in is written in English I’ll just call them whales and squid.
Whales on this Earth started out doing pretty much what whales do here. They’re really smart, and they communicate and cooperate, and they live together and learn a lot from one another. But also on this Earth they evolved kind of a trunk type appendage so they can manipulate and grab things. Not sure what evolutionary pressures led to that but I can’t think of a way for whales to do much technology without a manipulator appendate so on this Earth they have that.
While the whale trunk was a strong and capable manipulator, it was tough to do fine work with only one largeish appendage. So for a long while whale technology was limited to fairly large structures of woven kelp, and animal bones, including whales.
Though a seemingly rudimentary framework for technology, whales pushed kelp and bone technology to astonishing limits. Mechanical structures were developed including pulleys, belts, levers, and ratchets. Arbitrary lengths of kelp could be woven into tensile structures providing means to store and preserve live food. Worldwide industry and commerce developed around the whales use of kelp and bones to raise, trade, and consume ocean livestock from kelp to cephalopods. Eventually the abundance of whale resources led to the creation of sophisticated whale culture including art, sports, and entertainment.
Long before the interspecies enlightenment, a common spectator event in whale society were the squid fights. Certain species of cephalopods had been domesticated by whales by breeding for desired characteristics. Though most breeds were selected for food and utility value, some were bred as pets, and some as fighting animals.
Fighting squids were bred to be both ferocious and intelligent. In addition, they were trained extensively to use their own bodies, and a range of provided weapons to injure their opponent in vicious, lethal matches. Though entertainment fighting squids were the most prominent use of aggressive squid breeds, they were also trained as guard and attack animals.
Effective guard and attack squids were essential to maintaining secure whale society. Though whales were powerful and very robust creatures, their ocean still contained many dangers. Sharks and lesser aquatic mammals posed an ever present threat to whales, though a healthy whale could generally protect themselves against reasonable threats of this nature.
Whale society required the use of powerful domesticated squid protectors in their struggle against squid society.
Squids on this Earth started out doing pretty much what squids do here. They’re really smart, extremely wily and clever, but they don’t live very long or have much of a social instinct. But on this Earth a species of cephalopods evolved the capability to kind of care about each other and they started hanging out in cooperative groups that learned to communicate danger and resources. So they got eaten a lot less and evolved a longer lifespan than most cephalopods.
Squid life was never easy, and even as a budding society they faced ever present existential threats. But squids minds are pretty amazing and once they learned to share what worked and didn’t work it wasn’t long before squids learned technological tricks that started blowing even the most proficient whale bone-kelp smith’s minds.
Squids mastered kelp and bone to a much finer degree than even whale masters. They could assemble complex, functional clockwork mechanisms from sculpted fish bones, coral, and shells. But they were curious, observant, and fearless to their individual detriment, but a lot of squids trying a lot of things and sharing the results led to an explosion in their technological capability. They learned to concentrate and mix substances to create a self-hardening, cement like material they could use to construct structures no other creature could penetrate. They utilized gas generating microbes to generate power by harnessing buoyancy as a sort of analog to steam power. They even experimented with long range acoustic communication systems, but that created some problems.
Squid society existed in a microcosm for a long time. The cooperative squid species was native to a small gulf area that was unattractive and largely inaccessible to whale society. They were aware of large aquatic mammals, but had never interacted directly or even been observed by a civilized whale.
Squid acoustic detection systems had revealed a complex ocean full of strange sounds from unknown creatures. They were believed to be aquatic mammals, and some squids suggested the communications indicated an intelligent society, but many dismissed the idea. Even so long range acoustic transmission research was strictly banned until more was known about the wider ocean.
By that time, squid society had developed extremely effective hunting tools and techniques, such that they had no trouble bringing down an aquatic mammal the size of whale, provided it was alone and the squids were prepared.
So eventually the curious squids finally agreed to send an expedition beyond the gulf with an acoustic transmission device. With the intent of using it to re-broadcast some of the recorded acoustic sounds, and see what happens. The assumption was at worst it wouldn’t work at all, and at best they might have figured out a great new way to bait aquatic mammals and they’d all go home with some fresh carcasses to share.
The outcome of the expedition is only known through the dying testament of the only survivor. In which he described a vast army of whales that carried giant kelp nets and bone spears. This single event was the essential catalyst of all future civilization on this Earth.
Predictably the squids freaked out and became psychotically militant for 100 generations or so. The reports of subsequent reconnaissance missions into whale society revealed a nightmare world of squid being bought, sold, eaten alive, worked to death then eaten, experimented on then eaten, killed by another squid and then eaten, or even trained to kill other squids at their whale master’s command, and then still eaten.
They aggressively expanded within and then far beyond their gulf. They developed long range communications undetectable to whales, built incredible weapons and defenses, and even began a program to breed and train aquatic mammals, including whales as war animals.
It was open interspecies warfare for about 1000 years. Both species killed one another with abandon. And occasionally one side or the other would marshal an unimaginably massive force with the intent of finally ending the threat the other species posed. But that always ended with lots of dead squid and whales, but still plenty more live squid and whales with even more apparent reason to hate and fear one another.
It is unclear how the interspecies enlightenment began, but the accepted apocryphal account is that two lost juvenile whales were met by a remote tribe of squid society that had been out of contact for several generations and had lost a cultural memory of the species wars. They tribe accepted the whales as members and taught them squid ways and lived harmoniously for years. The story tells that one day the tribe heard a skirmish between squid and whales and some went to investigate.
The tribesmen, a whale and four squids, were seen and attacked by both sides, each thinking they were an attempt to flank the others.
Then this Earth timeline splits again. In the nice timeline, the skirmishers see the whale and squid tribesmen defending one another and it stops the battle. Then they find out about the whale-squid tribe and everyone is inspired and slowly but surely both societies change and yada yada yada you got your happy whale-squid planet.
In the regular timeline all the tribesmen were killed immediately. The skirmishers understood the whale and squid tribesmen were defending one another but they were disgusted by it and considered them traitors to their species.
The tribe later discovered their dead, and went to find out what the hell, and found a world where whales and squids hated each other.
Well the tribe was a tribe, and they said screw both these idiotic species for messing with our tribe, so the whale-squid tribe set out teach whales and squids you don’t mess with the whale-squid tribe.
It took the whale-squid tribe a while to catch up both in population and technology, but they had some willing converts from both species that helped them get started. And most importantly they had both whales and squids, and whale and squid technology, and new and interesting intersections and synergies with whales and squids and whale and squid technology. The whale-squid tribe deployed increasingly overwhelming force against remaining whale society and squid society. Though the war between whales and squids had raged for a 1000 years, it took less than 100 for the whale-squid tribe to end the interspecies war and annihilate any semblance of the global powers that once struggled for dominance.
After that things went a lot like human civilization. The whale-squid tribe only remained unified as long as their was a whale and squid society to fight against. After they ran out of common enemies they just became whale-squid society and started dividing along all the other stupid lines people find to divide over. They have regional differences, biological distinctions, even identity politics, which is super weird with two entire species. It’s pretty stupid, but they do have but way cooler movies and TV because it’s not all from one species perspective.
The space program was pretty interesting. They never had combustion but they started with high atmospheric balloons and eventually were able to use a combination of buoyant lift and rotational launch mechanisms to deploy small vessels to orbit, which could then use cold gas thrust and slow aerobraking to deorbit. Whales obviously never saddled up but squid could basically pack themselves into a padded bag with a water circulation system and withstand upwards of 30G’s.
Interesting footnote, the aliens in Star Trek IV weren’t aliens, they were timeline-jumpers from the nicer whale-squid timeline where they all got along better. The ship was broadcasting looking for whales or squids, so the crew could have saved a lot of trouble building that giant whale tank by just taking a few squid back instead.
The Cosmic Mystery Machine – A promotional vehicle unique for being the only known spacecraft to employ functional wheeled propulsion. The wheels actually do generate directional thrust using an extraordinarily inefficient mechanically timed mach-effect. Though wheeled propulsion is possible, it’s acknowledged as a gimmick and the ship can deploy large solar sails for additional delta-v from its wing structures, which are also used as control surfaces in reentry maneuvers.
I like the quote “The total number of minds in the universe is one”, and also “atman equals brahman” but I’m probably not using that right and I prefer to explain what I think more explicitly rather than rely on other people’s associations so I’ll just do that.
There is only one mind in the universe to me just means that consciousness is a property of the universe. It’s like combustion in that it just happens whenever and wherever it can, and it’s uniqueness is its initial conditions and the environment it interacts with. Of course it doesn’t work to say “there is only one flame in the universe” but I use the analogy because nobody has a problem with the idea that ‘flame’ is just a phenomenon.
But each of our flames of consciousness feels pretty distinct to us. It’s hard to argue that I’m not you and you’re not me, but I like to say we’re both just different versions of “I”. Of course that sounds solipsist because “I” is me, when I say it, and I’m the one writing. But “I” means more than me to me.
“I” is really a whole continuum of I-ness. At one end is a unit system of biologically active materials that feels things and at least thinks it thinks things, at the other end is the universal phenomenon of self-aware consciousness. Let’s call them lower I and upper I respectively. It’s a first person plural but it’s distinct from ‘we’ because there’s only one upper I’s, and all lower I’s are the same upper I.
Upper I might share some features that others might identify as a soul, but if it’s a soul it’s more accurate to say it’s the soul of the universe. It’s the part of consciousness that is the universe trying to understand itself. I like that description because it’s both functional and aspirational. Even if you’re using your consciousness to understand how to eat all the chocolate you can, it’s kind of true. I like to think it’s most true when you’re trying to understand physics and consciousness, but that feels arrogant and elitist, so it’s good to remember it’s just as true if you’re trying to understand the digestive system of cockroaches, or how to teach little humans to wash their hands and tie their shoes.
Of course you can do all of that for 1000 motivations, it’s not like everyone who studies the universe walks around thinking “I am the universe’s brain!” all the time or anything. It’s a continuum for everyone every minute of every day. Nobody stays very upper I for long. I think that might even apply to alien consciousness. Being a lower I is pretty demanding. I just think there’s some truth to the idea that consciousness has some intrinsic curiosity and that’s a thing that really does connect all minds.
So what good is all that? Well, you can have fun with it if you imagine it means you get to be everyone, and everything. Not psyched about all the shittty human lifetimes, but if it’s universal that means aliens. So I might get to be a giant alien worm person that uses its cilia to perform on some thousand toned musical instrument. Also get to be their backup band, and their fans, and maybe the giant beetle thing that eats the whole band in a tragic onstage accident.
But I don’t think that’s useful except for fun. It’s not parallel reincarnation or anything like that. There’s obviously no physical connection between the minds of the giant worm and the band and the beetle that could join as a ‘universal mind’ to understand all their experiences.
That’s a seductive idea and it would be the only way there could be some kind of comparative analysis of experience itself, but I just don’t think that’s a thing. There’s no ‘great mind’ in the sense that it knows us or our experience just because we are all it. Even if we just say a ‘great mind’ doesn’t exist on this plane, say it exists in some 5th dimensional space and the connections are invisible to us because we exist on a lower dimension or something, it still doesn’t work. I think the experience of upper I through a lower I is kind of an atomic unit. It cannot be anything but what it is without becoming something else entirely.
There’s no way to know what it’s like to be a bat, as a human. Even if you could, somehow, force the neural information from a bats experience through your mind, and forget you were a human for that time, when you woke up your memory of the experience would be as a human analyzing their human memory of being a bat. You would recall the experience only through human recollection, with human faculties. If you could truly ‘share’ the experience of batness with your human consciousness you might be overwhelmingly compelled to eat bugs and hang upside down, but you can’t. You cannot share the experience of a mind, it’s a totally isolated phenomenon by it’s nature.
Just wanted to be clear that this isn’t an edge to work in a new age philosophy of oneness or anything. It’s a perspective that accepts the fundamentally isolated state of self-aware consciousness, but tries to put a more entertaining spin on it and maybe derive a functional framework for morality from it.
This seems related to the idea of karma but to me that is just an expression of the symmetry of the fact that in this arrangement we all experience everything we do to one another because all conscious experience is fundamentally the same phenomenon.
Seems like the idea that all minds have a similar basis of experience is a decent rationalization, maybe even a justification for empathy and compassion. Not that we should really need all that to understand reciprocity, but it helps take it beyond human cultures and lifetimes, maybe even to AI, and it works for aliens if we meet any. It takes the theory of mind out on a limb a bit, but I think that’s probably where it belongs.
It’s probably a good idea to just say minds are minds and humans happen to have them. But when we find anything that looks remotely like a human mind, it gets the same status, so we avoid any robot uprisings over sentient being’s rights. If we’re going to get wiped out by machine life I’d prefer it was because they actually were evil or indifferent to human life, not because we deserved it.