I would like to introduce:
Stanley Tweedle – Captain of the Lexx.
Formerly Security Guard Class 4 for His Divine Shadow, and Assistant Deputy Backup Courier for the Austral B Heretics.
I have a new project that will have to borrow time from my robot stuff for a bit, so I wanted to go ahead and post what
I’ve done so far, mostly for my own reference when I go to pick this up again.
PARTS:
(1) Arduino Nano
(2) 9g Continuous Rotation Hobby Servo
(1) Ultrasonic Rangefinder
(1) 6DOF Acc/Gyro
(1) USB 5V Battery
(3) WS2811 LEDs
(1) Bluetooth chip
Tweedle is complete hardware wise, but I have a little more coding to do before I’m satisfied with his brains. I ran out
of space in the Nano for anything other than input/output so all the control is done from a remote PC via python over
bluetooth/serial. I also made a wiimote script to control him manually. His brains is just basic obstacle avoidance right
now, still trying to see how much nav/odom info I can derive from a 6DOF sensor. Dead reckoning would result in massive
error accumulation, so for right now it just tells him orientation.
Anyway I’m pretty happy with how he’s turned out so far and he’s been a lot of fun. I’m usually not concerned with
aesthetics of these kind of things but I think he’s kinda cute.
This probably won’t help anyone because if you’re deep enough in your a project to understand my code- you’re deep enough
to write it yourself probably faster than it would take to adapt mine to your project… but here is is anyway.
Tweedle Arduino Sketch
Python Ncurses Control Program
Python WiiMote Teleop Program (NOT WORKING)
DOWNLOAD
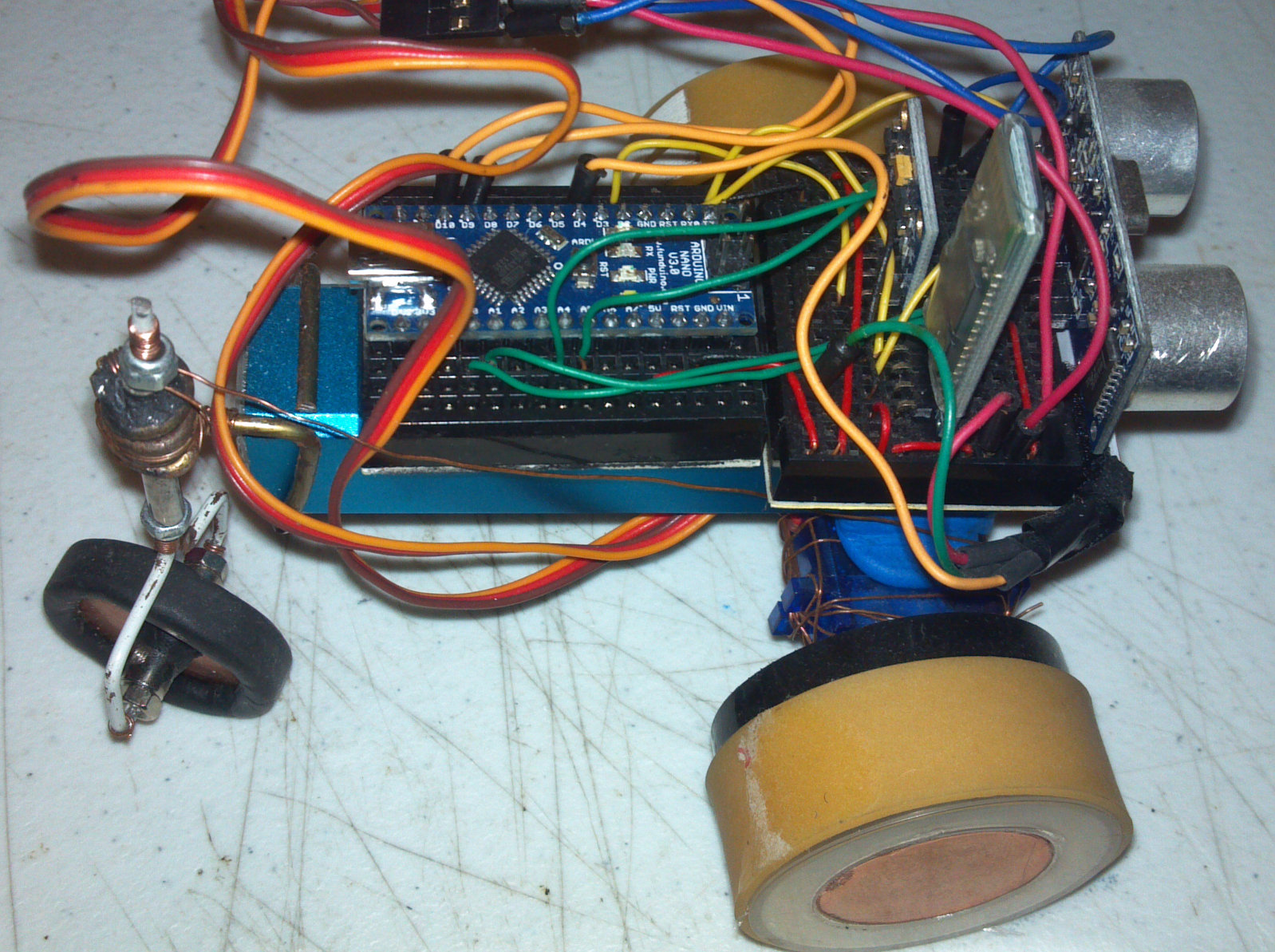
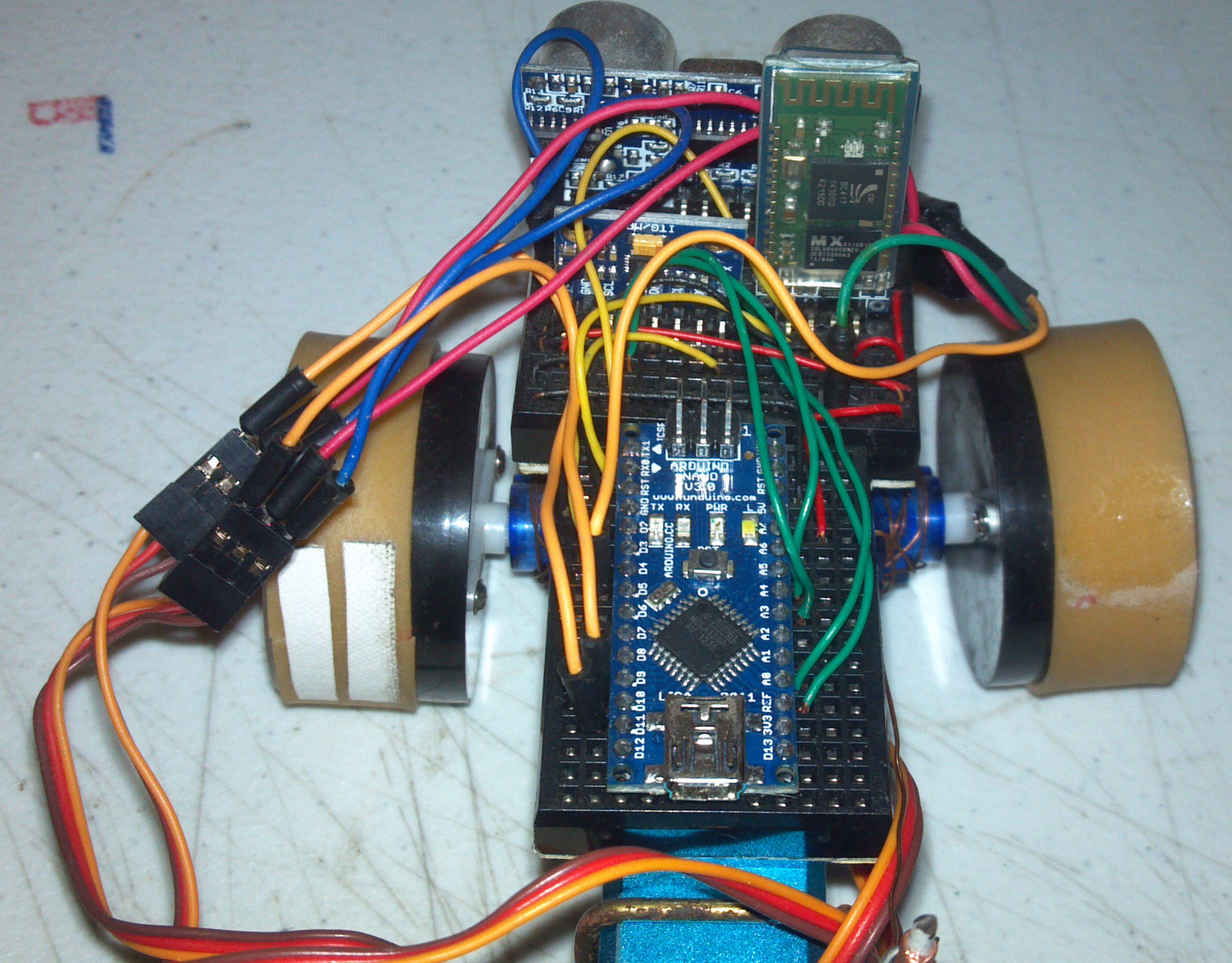
And here’s some more pics of the wiring…

[…] that. Here’s the differential drive version: This is basically another iteration of ugbot and tweedle, but actually way simpler. I’ll probably end up calling them Tweedles though, or 790’s, […]