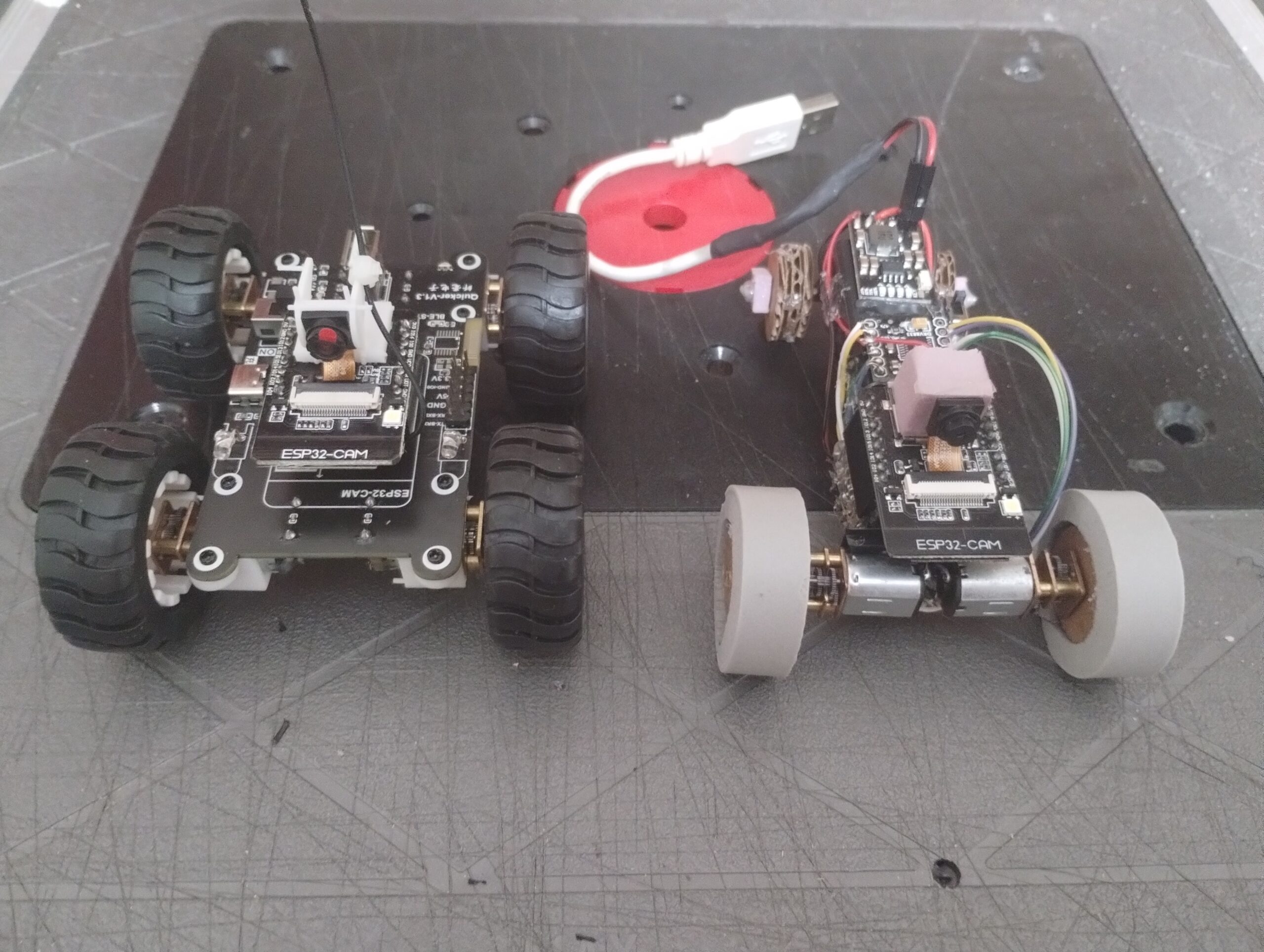
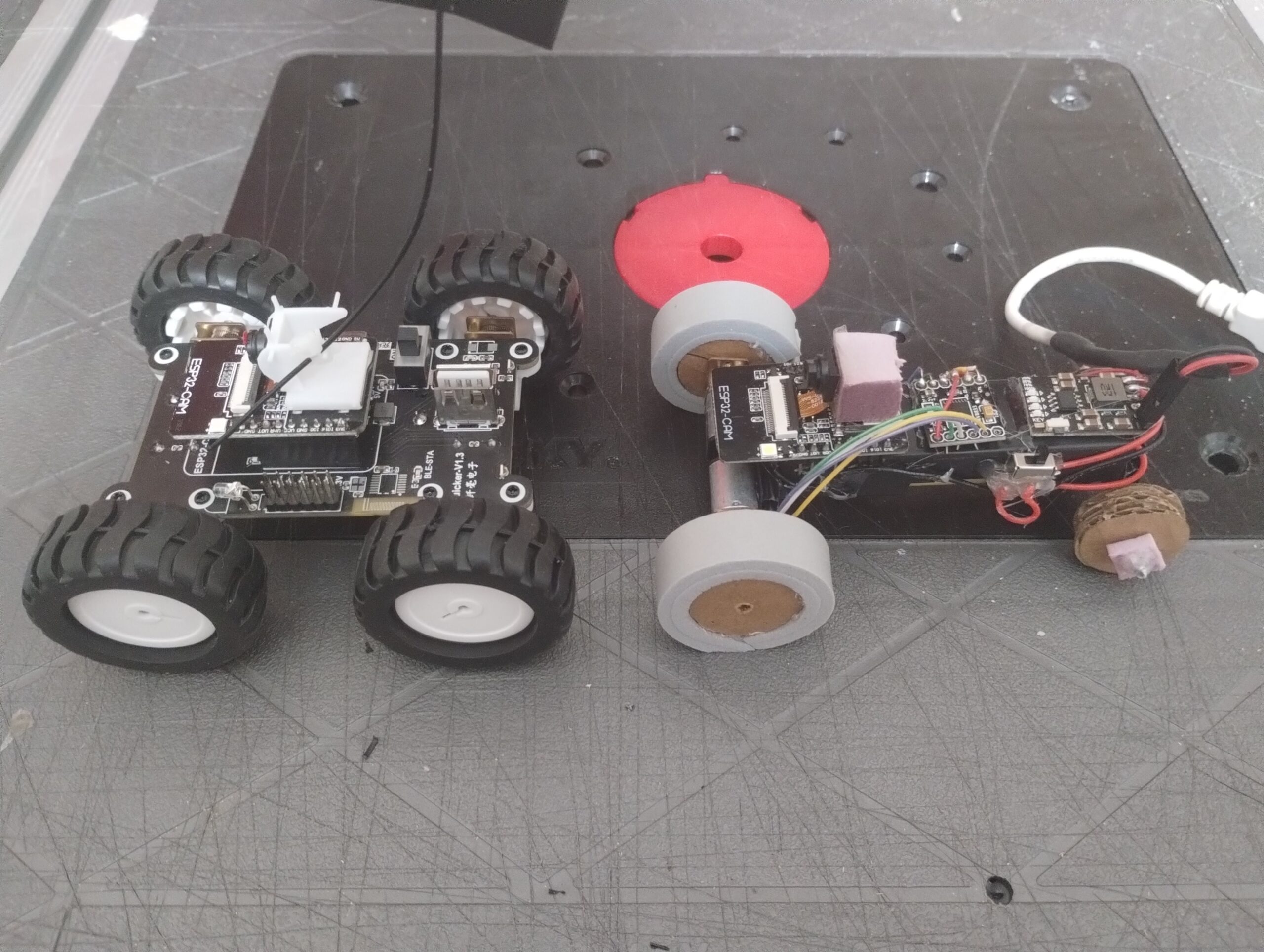
I never improved my ‘ESPCreep’ (https://github.com/funkboxing/espcreep) Servo Drive robot car, mostly because the 3d printing issues were tiresome, but I still wanted a simple drive platform and kept looking around. I found this pretty nice little ‘Quicker’ package on Aliexpress (on the left). https://www.aliexpress.us/item/3256803512050979.html.
After looking at it online for about a year I finally talked myself into ordering one. A month later it arrived and I didn’t trust whatever they flashed from the factory and had trouble getting the source code because it was on Baidu and in Chinese. From the one pdf I could access and some googling I found the code must have been derived from this: https://www.pilothobbies.com/product/scout32/. So with that in hand I was able to flash a working control webserver. I was pretty happy with the purchase but after driving it around for about 5 minutes I started thinking about making my own.In the past I’d chosen 360deg servo drive because on paper it’s a great solution. One PWM line per motor controls both speed and direction. Problem is you’re limited to a servo’s power and package, which aren’t ideal. Also you have to find the ‘center\stop’ position on each servo and it’s never exactly zero. DC motors need a motor controller and that increases the part count.
But seeing the ‘Quicker’ car and code I saw it’s pretty easy to work with DRV8833 H-bridges. It’s only 2 PWM per motor and you get all the power and options of using DC motors. Also I happened to have a bunch of HW-627 DRV8833 modules I got for steppers so it wasn’t hard to start breadboarding it all up. Also had some boost-charge modules and some 18650 batteries and holders.
So after breadboarding success I soldered\glued the monstrosity on the right together. Though the wheels are literally made of garbage it moves around okay. After that I remembered Fritzing and OSH Park exist so I slapped together a PCB and sent off to have 3 made for $20, which includes expedited production.
Let’s just take a second to think about how awesome it is that things exist that let me write that last sentence, and that it only cost $20.
So while I’m waiting for that to come in I’ve got some other notions about a ‘Modular Robotic Funhouse’ that I need to play with. I’ll post more on that later. I’ll post the code later, right now it’s still just the Scout32 code with ArduinoOTA added for convenience.
Here are the parts:
ESP32-Cam
HW-627 (DRV8833 Dual H-Bridge)
HW-775 (Boost-Charge)
18650 Battery holder and battery
(2) N20 Motors