This is an attempt at a bot design that’s driven and steered by only one servo. I have no justification for this other than it seemed like it had to be doable.
I’m absolutely sure a single servo actuated steering\drive mechanism exists somewhere, but I couldn’t find any. I’m guessing the designs that do exist are for very specialized applications where some factor makes using only one servo desirable. Using two 9g hobby servos for any reasonable DIY application is pretty much as easy as using one, so there’s really no advantage in the added complexity of the linkages at all.
But despite it being a fundamentally pointless idea, I couldn’t get rid of it. A servo set up as a rear paddle of a canoe could control direction and momentum so why not a wheel? I thought about doing something like a ‘wheel paddle’ that would work a bit like a skate, pushing laterally to roll forward and varying the angle to each side to control direction, but that seemed like a copout somehow so I thought about more classic wheel\axle setups. This design is optimized for simplicity- lol… what that means is this is the minimum effort required to satisfy my weird compulsion to demonstrate this is possible, knowing I have no intention of taking it any further than that.
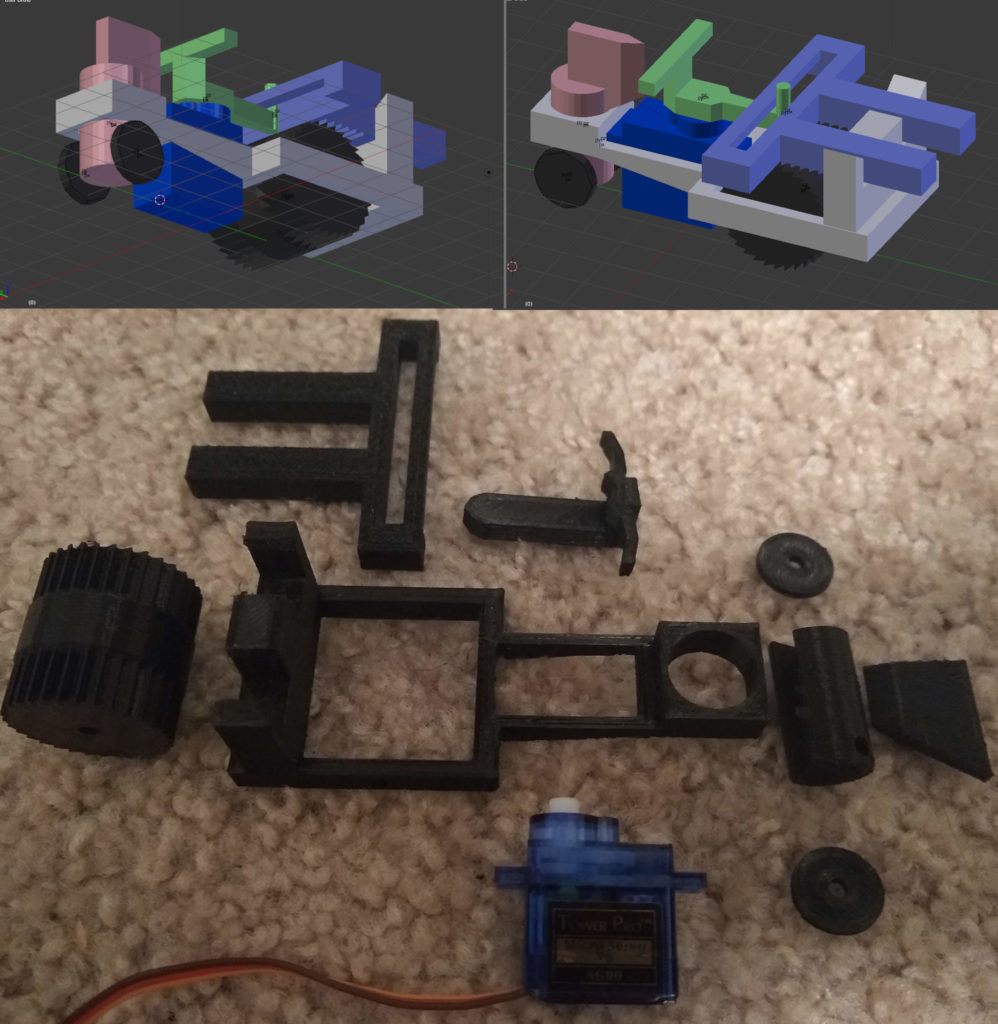
So the drive is a kind of rack and pinion thing with the teeth angled to turn the wheel on only one stroke direction. I should have used a little ratchet catch but didn’t. I’d seen more complex ‘mechanical rectifier’ setups that could drive on both strokes, but meh. I went with the T bar steering setup so you could kind of ‘set’ the direction and just work the servo around it so you can go straight and make smooth turns. Other options were to keep the steering connected to the servo but that would force it to always move in a serpentine pattern.
The video is a bit of a disaster. I tried to create the mechanism in the blender game engine using rigid body dynamics but I’m about 5 years out of practice with that program and forgot a lot so I just kind of winged it. The simulation is clearly jacked. The gear wheel doesn’t work right because I couldn’t figure out a directional rotation constraint and friction is wonky in the bge. Everything kind of floats, it’s awful, but I think it shows the functionality I wanted it to show and that’s the whole point of this pointless thing. I also tried to 3d print it, but… yeah- lot of quick-n-dirty solutions in the game engine version didn’t translate to matter so it didn’t really come together. But since I spent the time and the PLA I put it in the video too.
This obviously wasn’t a success, but I don’t think I can call it a failure either. Like a lot of my projects it kind of works in a way and if someone with more skill and determination took a stab it could probably be cool little demo thing. Anyway- it’s something I did so I could stop thinking about doing it so now I guess I’m done and I can do another thing.
That’s pretty neat. It took me a minute of watching the video (figure of speech, its on 58 seconds long) before I figured out how it worked.