Just posting this to help anyone else who might have gotten the same weird-ass breakout on their Nokia5110 and are trying to connect it to their Raspberry Pi.
Got it here:
http://dx.com/p/arduino-1-6-lcd-display-screen-for-nokia-5110-red-silver-140226
I found the most helpful info in this post
http://www.raspberrypi.org/phpBB3/viewtopic.php?t=9814&p=264142
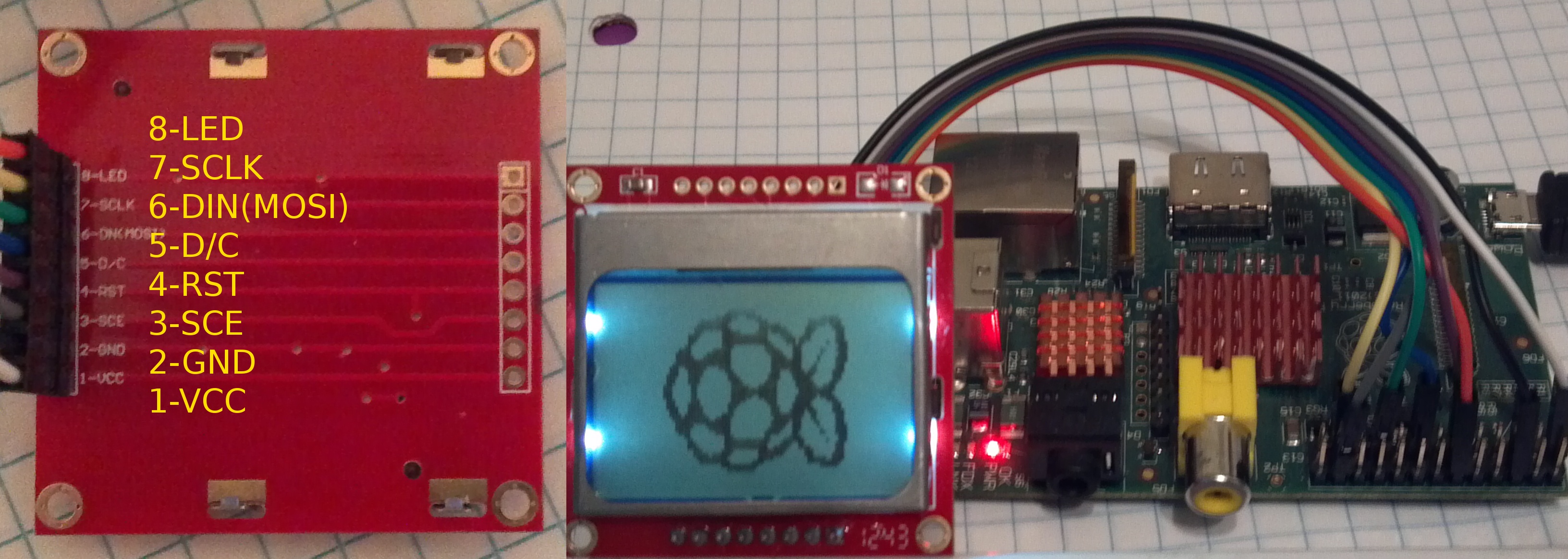
And here are the pin assignments that finally worked.
NOKIA RASPI-GPIO (colors are for reference with the picture)
1-VCC|VCC PIN01 – Power-WHITE
2-GND|GND PIN06 – Ground-BLACK
3-SCE|CE PIN24 – Chip Enable-GRAY
4-RST|RST PIN11 – Reset-PURPLE
5-D/C|DC PIN15 – Data/Command-BLUE
6-DNK(MOSI)|DIN PIN19 – Serial Input-GREEN
7-SCLK|CLK PIN23 – Clock Input-YELLOW
8-LED|LIGHT PIN12 – LED Backlight-ORANGE
