[EDIT] Please check out the newest version of the FX Code (v0.51) with Android Bluetooth Control App and Chrome Control Extension.
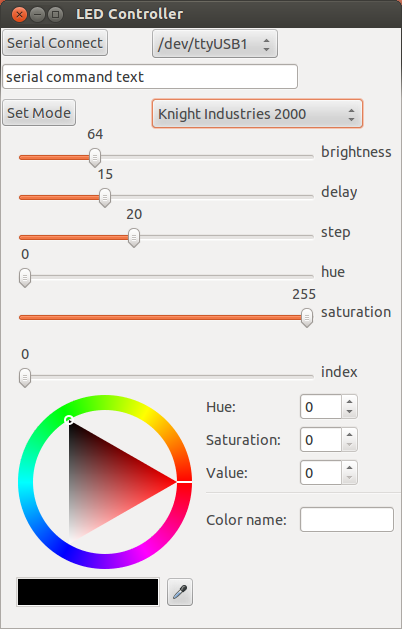
[EDIT] Revised once again, and made a python GUI. See this new post.
This is a revision of the original FastSPI LED Effects Examples I wrote awhile back.

I’ve gotten some very positive responses for these examples so I figured I should update them to be a little less clunky (the operative term here being ‘less’, they’re still quite clunky) This revision will work with RC3 of the FastSPI2 Library.
http://youtu.be/5c6vYoZInjw
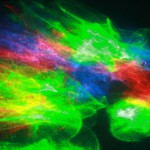
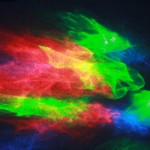
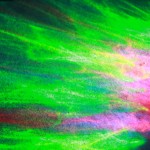
These are little LED displays I made, one is a circular back-light and the other a wave shape with a little diffusion in front. Both are Arduino powered of course. I just ran the ‘demo mode’ on both and tried to start at the same time so they’re not in sync or anything. Just thought I’d show them on a couple of different configurations for the heck of it.
If you have any issues getting this to work please check through the comments on the original post page first. A lot of people have posted very helpful comments about their experience using the code that might help you on your way. And of course feel free to post your issue if you can’t find a solution- I’ll do what I can to help.
Most significantly I’ve removed the need for the SerialCommand library and the really hacky HSV->RGB conversion function in favor of the native FastSPI2 conversion which is much faster and cleaner and supports ‘rainbow’ and ‘spectrum’ modes (though for these examples I just stuck to ‘rainbow’.)
I also added one example of a ‘native’ FastSPI effect; the fill_rainbow function (new_rainbow_loop – mode 88). This is similar to the ‘rainbow_loop’ function except that is fades the colors into one another much better. I’ll add more ‘native’ effects functions like fades to the code later because they are much faster and have nicer aesthetic qualities than mine.
Change modes the same way as in the previous code, enter ‘m’ and then an integer for the mode number (listed in code). Also make sure you send a NEWLINE character. Mode 888 is ‘demo mode’ which cycles through all the modes, but this tends to block the next serial command.
Also you can change the maximum brightness with ‘b’ and then an integer from 0-255. By default it’s set to 64, about 1/4 brightness.
Here is the code.
[EDIT] I recently fixed a few issues where I messed up the HSV conversion and I utilized a few more of the FastSPI2 functions. Also finally started giving the code a version number. This one’s v0.3, I’ll do better with that in the future.
Most notably I added the ability to adjust parameters of many of the effects via serial commands. The following commands are now accepted:
(d)elay 0-INF | d50 | Adjusts the delay value, effects run faster or slower.
(s)tep 0-INF | s5 | Adjusts the steps between colors, mostly for rainbow effects.
(h)hue 0-255 | h180 | Adjusts the hue of effect, mostly for one and two color effects.
sa(t)uration 0-255 | s50 | Adjusts the saturation of effect, mostly for one and two color effects.
Here is the code. (v0.3)
—
If you have any requests feel free to ask, I’ll see what I can do! I’m more-or-less open for business if you have anything in particular you need tackled. And if you find these very useful, please consider donating a little via. paypal, I’d really appreciate it 🙂
[paypal-donation reference=”FastSPI2 LED FX Code”]
I’m also grateful for bitcoin donations to: 1K5Yy77ejes2FZrHBG5fns3QAicnwZcduq